O algodoeiro é o nome vulgar dado a várias espécies do género botânico GossypiumL., da família Malvaceae. Existem cerca de 40 espécies, arbustivas, nativas das regiões subtropicais e tropicais, algumas das quais são utilizadas para a produção da fibra têxtil conhecida como algodão.
Em estado selvagem, os arbustos do algodoeiro conseguem atingir até 7 m de altura. As folhas são grandes, com três, cinco (ou mesmo sete) lobos. As sementes estão contidas numa cápsula, estando cada uma envolvida numa fibra felpuda designada pelo vocábulo inglês lint (plural: linters). As espécies mais utilizadas para fins comerciais são G. hirsutum (Estados Unidos e Austrália), G. arboreum e G. herbaceum (Ásia), e G. barbadense (Egipto). Os linters são, geralmente brancos, mas existem também variedades com cor castanha ou verde que, para não contaminarem geneticamente a variedade branca, têm a sua plantação banida junto às grandes produções de algodão.
Cebola é o nome popular da planta cujo nome científico é Allium cepa. Em sistemas taxonómicos mais antigos, pertencia à família das Liliáceas e subfamília das alioídeas – taxonomistas mais recentes incluem-na na família das Amaryllidaceae. O termo refere-se, também ao seu bolbo (bulbo, no Brasil) constituído por folhas escamiformes, em camadas. As suas flores estão dispostas em umbela. As plantas jovens, com o bulbo pouco desenvolvido e sem flor, são chamadas também de cebolo.[1][2]
Musca domesticaLinnaeus, 1758, conhecida pelos nomes comuns de mosca-doméstica, mosca-de-casa,[1] é uma espécie de dípterobraquícero (moscas) da famíliaMuscidae. É um dos insectos mais comuns e uma presença habitual na maioria dos climas da Terra. A mosca pode pousar em comida, contaminando-a com bactérias, sendo responsável pela propagação de numerosas doenças.
Pinheiro é o nome comum das árvores pertencentes à divisão Pinophyta, tradicionalmente incluída no grupo das gimnospérmicas. Este artigo se refere apenas às plantas do género Pinus, da família Pinaceae.[1]
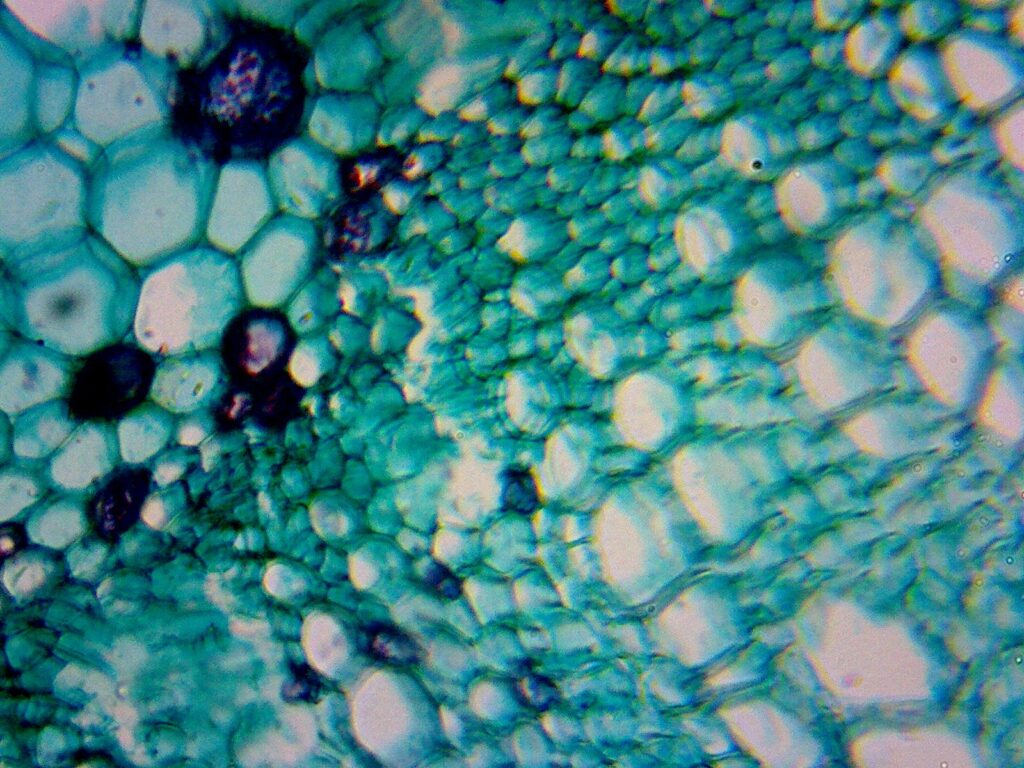
As dicotiledôneas , também conhecidas como dicotiledôneas (ou, mais raramente, dicotiledôneas ), [2] são um dos dois grupos em que todas as plantas com flores (angiospermas) foram anteriormente divididas. O nome refere-se a uma das características típicas do grupo: a saber, que a semente possui duas folhas embrionárias ou cotilédones . Existem cerca de 200.000 espécies dentro deste grupo. [3] O outro grupo de plantas com flores foi chamado de monocotiledôneas (ou monocotiledôneas), geralmente cada uma com um cotilédone. Historicamente, esses dois grupos formaram as duas divisões das plantas com flores.
Principalmente a partir da década de 1990, a pesquisa filogenética molecular confirmou o que já se suspeitava: que as dicotiledôneas não são um grupo formado por todos os descendentes de um ancestral comum (ou seja, não são um grupo monofilético ). Em vez disso, várias linhagens, como as magnoliidas e grupos agora conhecidos coletivamente como angiospermas basais , divergiram antes das monocotiledôneas; em outras palavras, as monocotiledôneas evoluíram de dentro das dicotiledôneas, conforme definido tradicionalmente. Os dicotiledôneas tradicionais são, portanto, um grupo parafilético . [4]
As eudicotiledôneas são o maior grupo monofilético dentro das dicotiledôneas. Eles se distinguem de todas as outras plantas com flores pela estrutura de seu pólen . Outras dicotiledôneas e as monocotiledôneas possuem pólen monossulcado (ou formas derivadas): grãos com um único sulco. Em contraste, eudicotiledôneas têm pólen tricolpado (ou formas derivadas): grãos com três ou mais poros dispostos em sulcos chamados colpos.
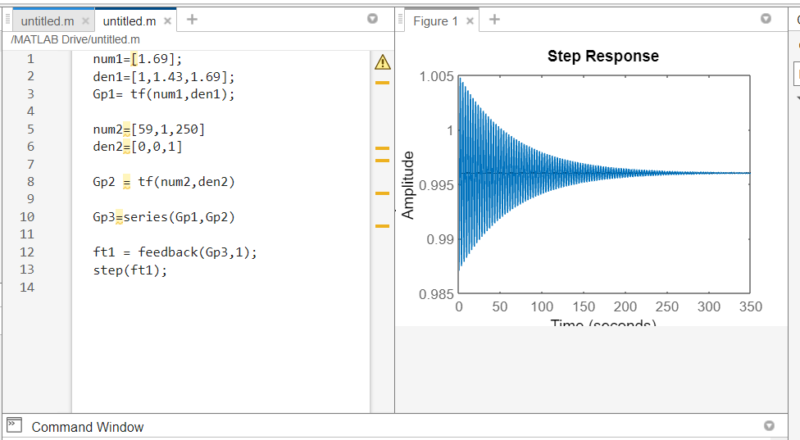
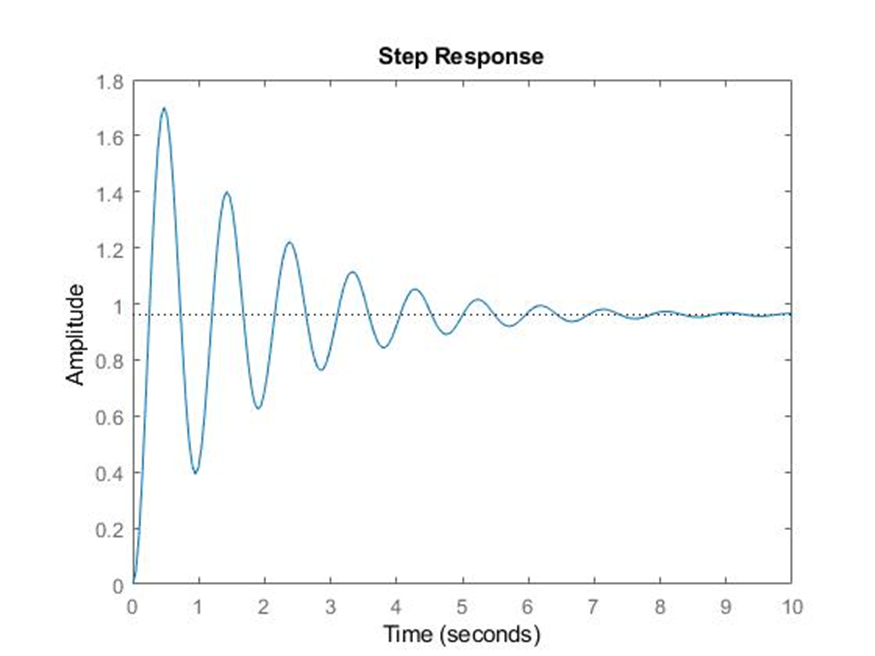
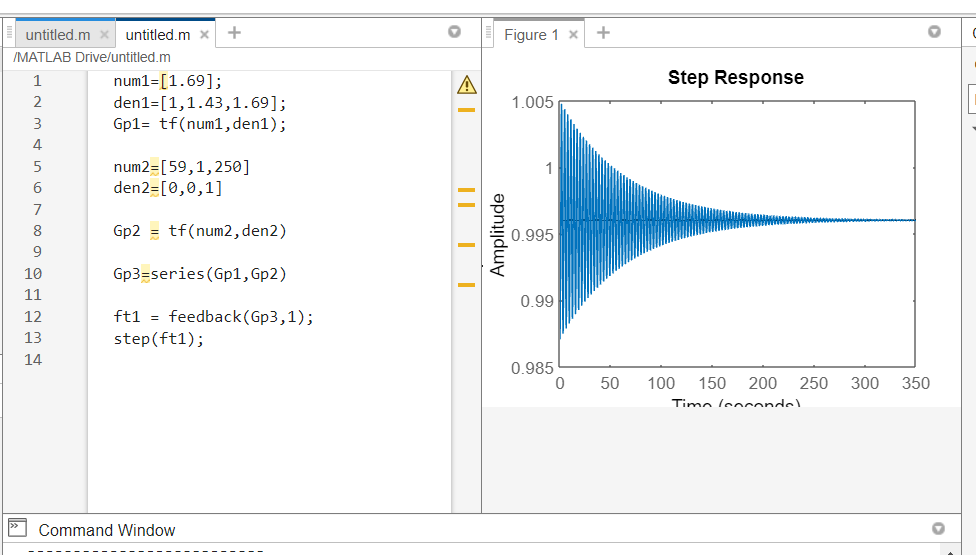
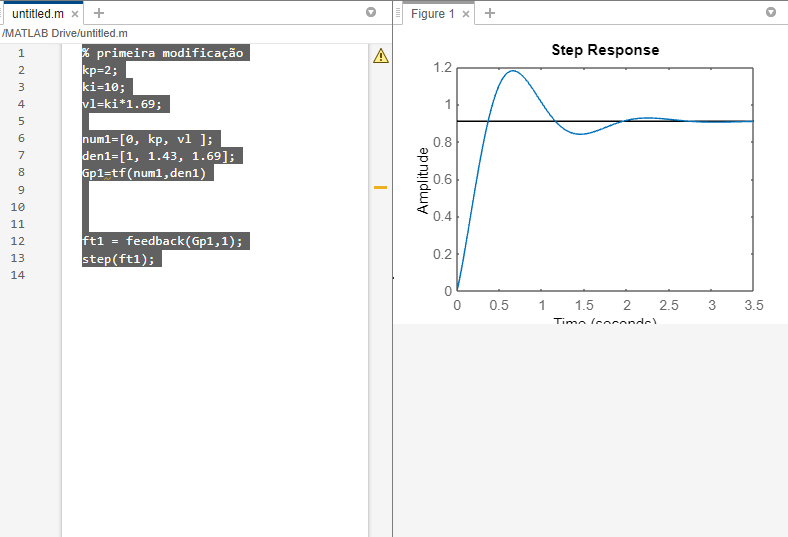
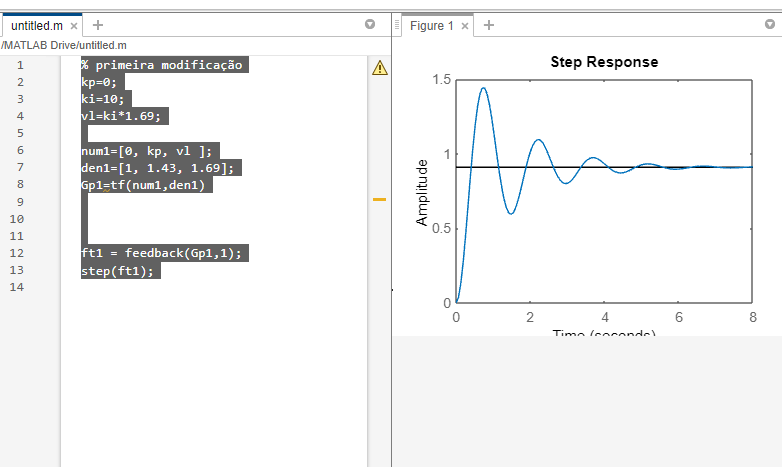
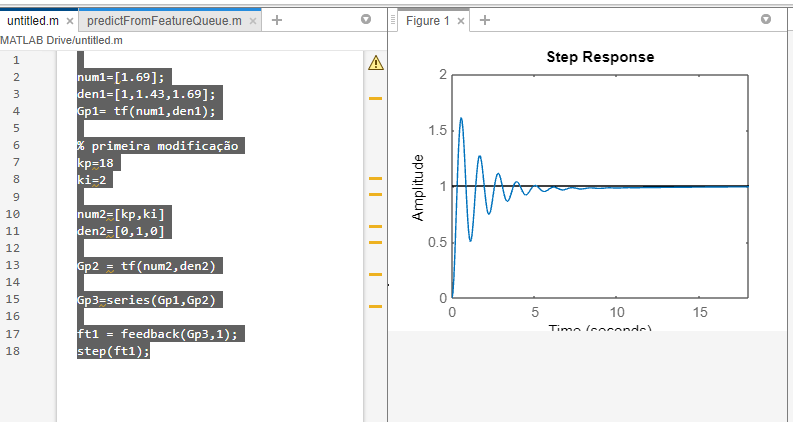
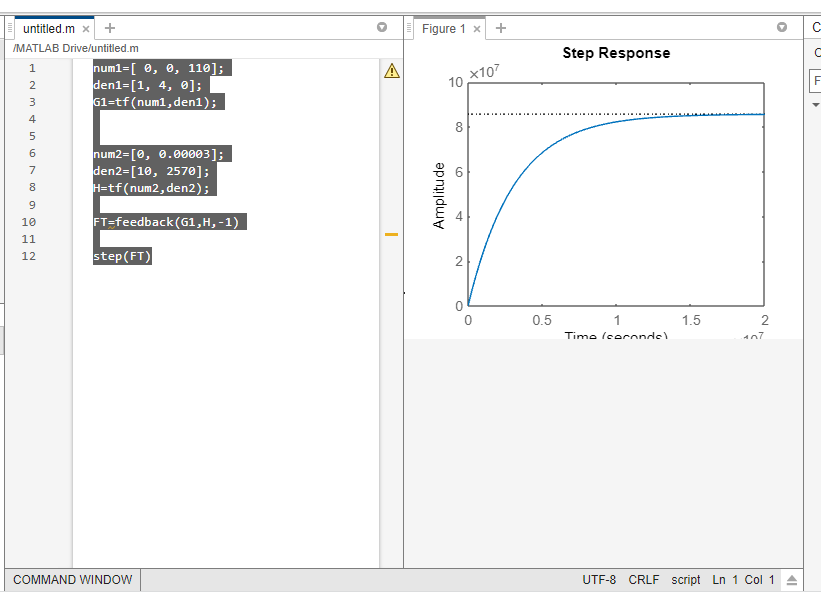
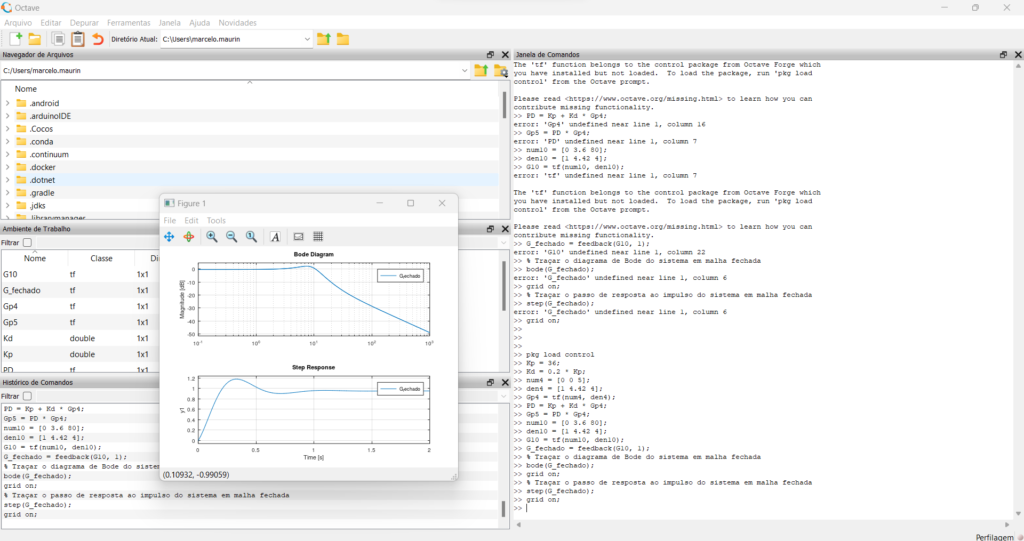
Conclusão: A amplitude ficou muito baixa, porem o tempo de resposta até estabilizar ficou extremamente longo.
Questão C
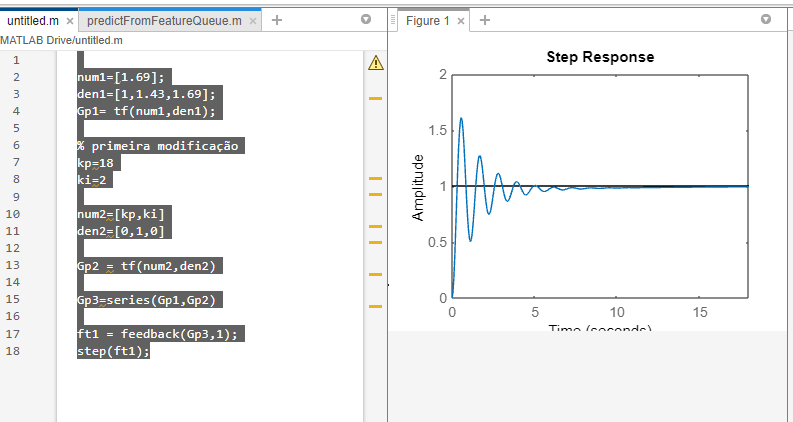
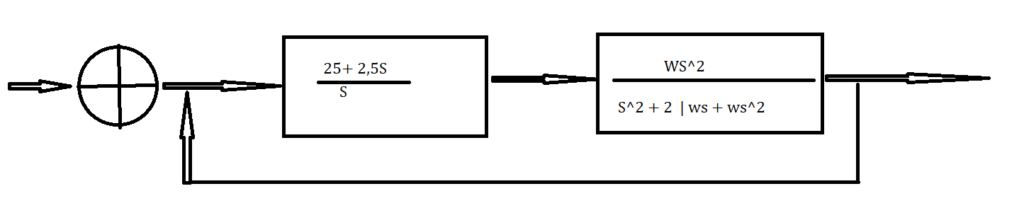
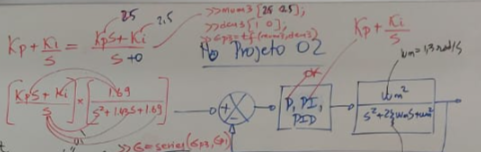
c) Controlador Proporcional Integral Derivativo (PID)
𝐶𝑎𝑑𝑎 𝑢𝑚 𝑑𝑜𝑠 𝑔𝑟𝑢𝑝𝑜𝑠 𝑑𝑒𝑣𝑒 𝑇𝐸𝑆𝑇𝐴𝑅 𝑣𝑎𝑙𝑜𝑟𝑒𝑠 𝑑𝑒 𝐾𝑝, 𝐾𝑖 𝑒 𝐾𝑑 para “melhorar DEFINITIVAMENTE” a resposta ao degrau quando comparada à resposta do sistema com o controlador proporcional-derivativo.
Atenção: você terá TRÊS (3) sistemas a modelar!
Para cada UM dos TRÊS SISTEMAS, realize as seguintes tarefas:
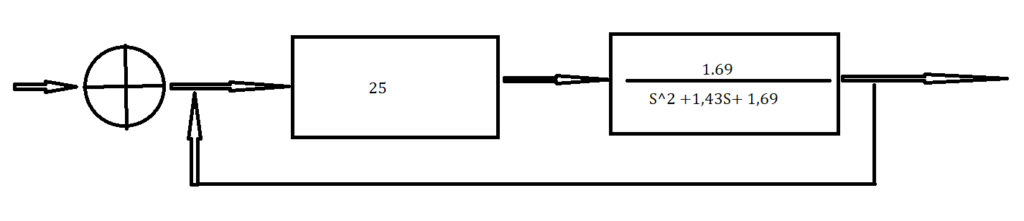
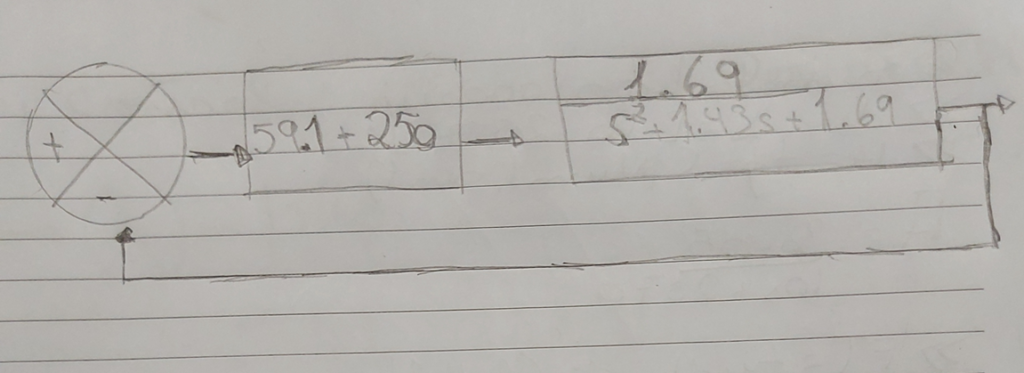
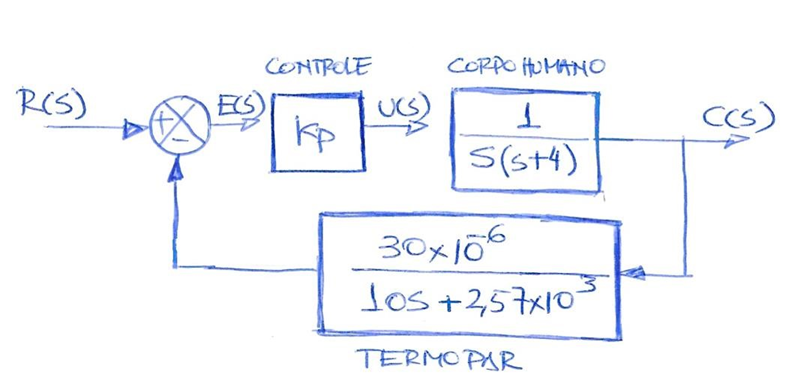
(1,0 pontos) Apresente o Diagrama de Blocos para cada um dos três sistemas;
(3,0 pontos) Apresente o gráfico da resposta ao degrau unitário para cada um dos três sistemas estabelecendo a comparação de desempenho ao se utilizar este ou aquele controlador.
(1,0 pontos) Compare as curvas encontradas para os dois valores distintos de 𝐾𝑝 referentes à resposta do sistema à rampa unitária.
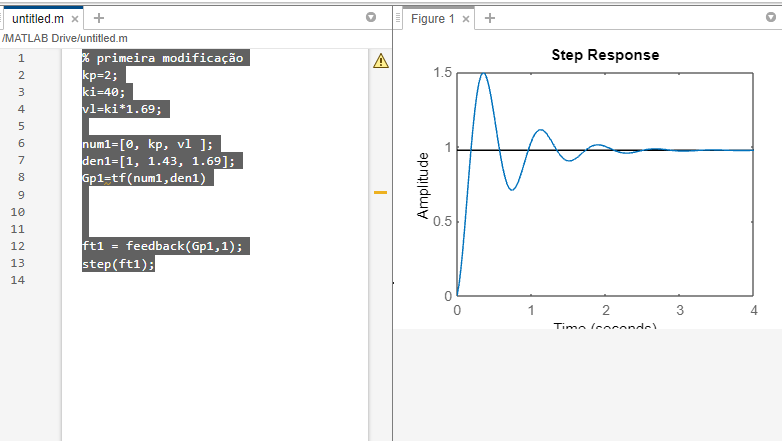
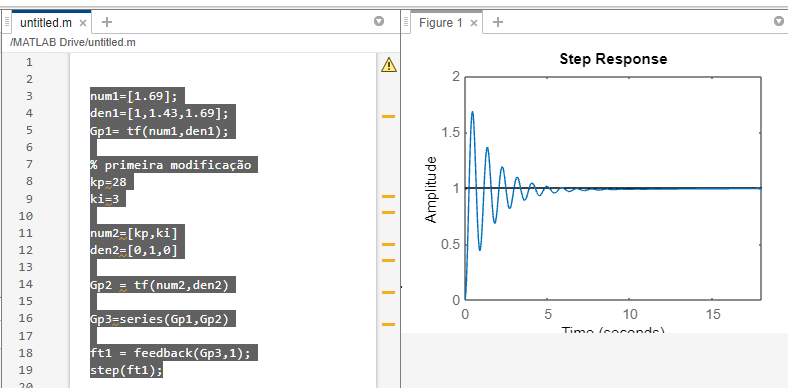
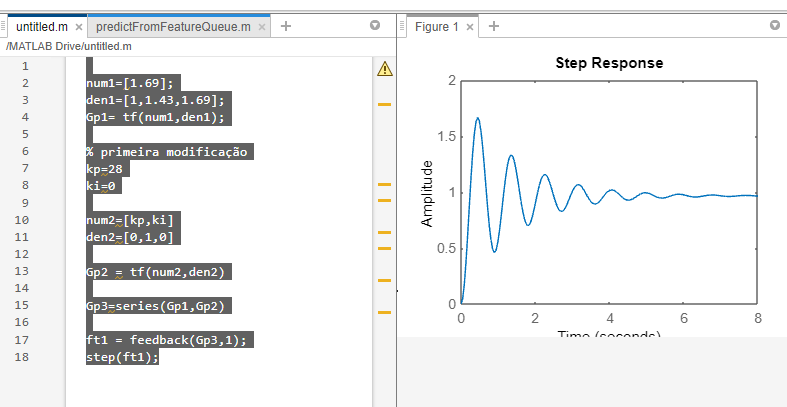
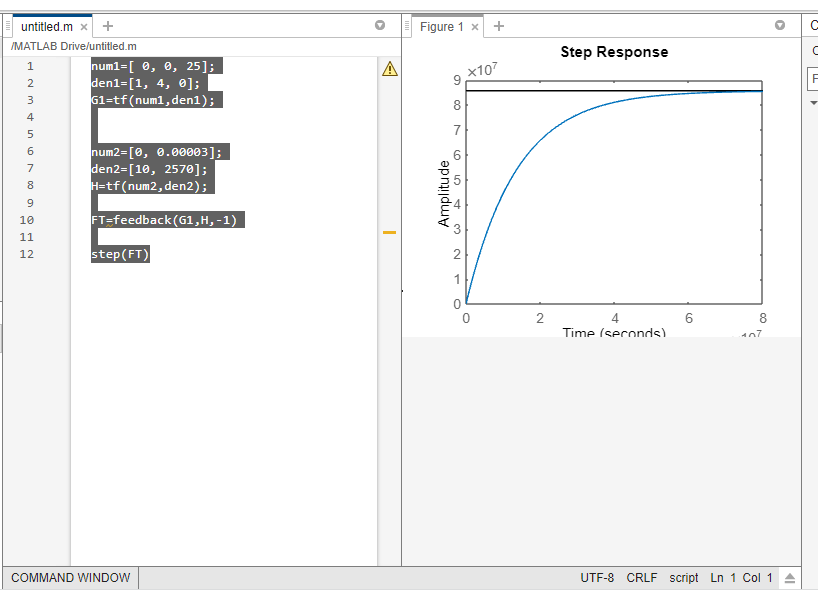
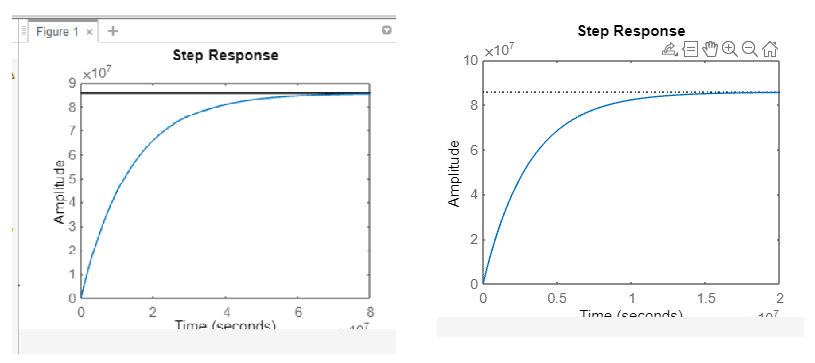
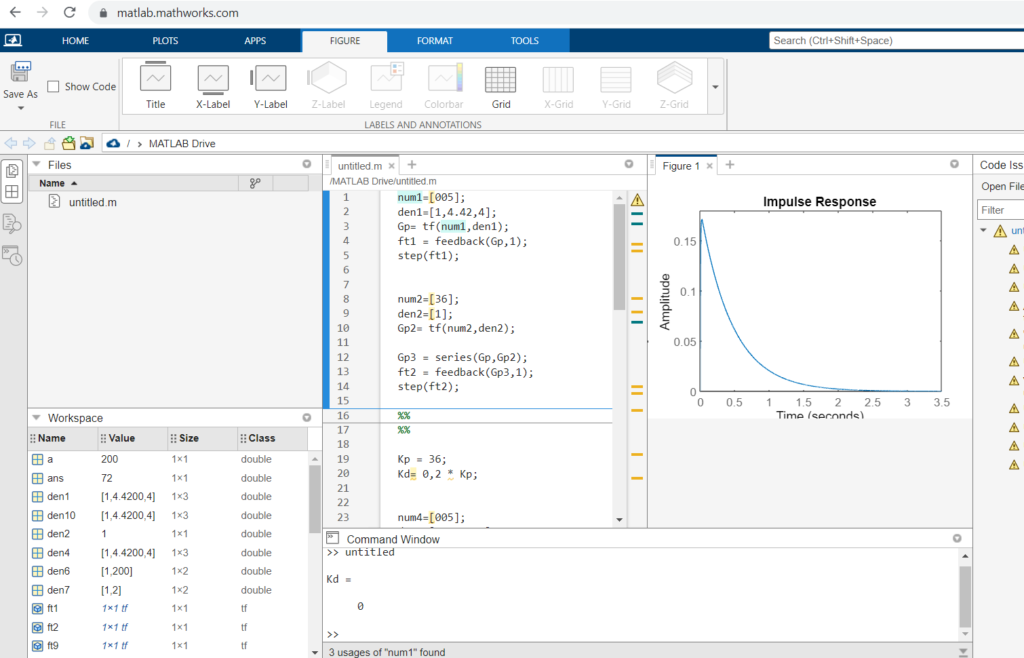
Kp=25
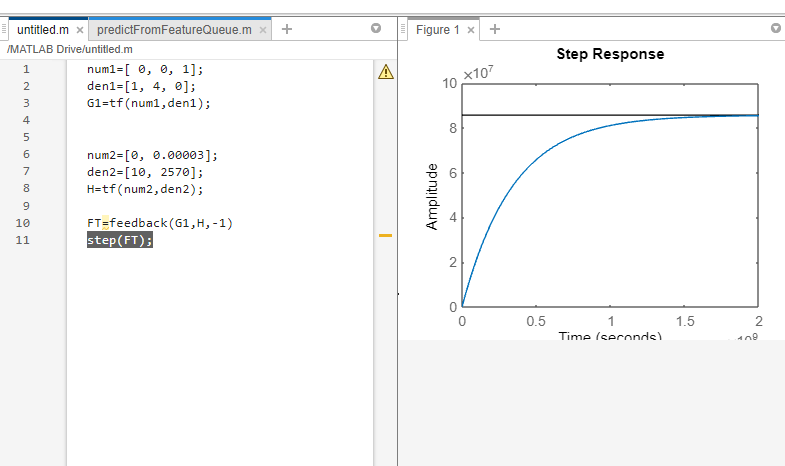
O gráfico da direita é o representado por KP=110, enquanto o grafico da esquerda o kp=25.
Podemos ver uma diferença grande no tempo de resposta, enquanto o de 25, demora 8 segundos para obter amplitude, o de 110, consegue resultados muito próximos em apenas 2, tendo uma melhora considerável do tempo.
Outro ponto importante é que a curva do kp de 110, é mais suave que a dede 25, apresendo um “cotovelo” menos promeniente.
O Octave é uma linguagem de programação de alto nível e um ambiente de desenvolvimento numérico, projetado para realizar cálculos numéricos e análises científicas. Ele fornece uma interface fácil de usar para a manipulação de matrizes, implementação de algoritmos, criação de gráficos e solução de problemas numéricos em geral.
Características do Octave:
Linguagem de programação: O Octave possui uma linguagem de programação própria, que permite aos usuários escreverem scripts e programas para realizar operações numéricas, implementar algoritmos e automatizar tarefas.
Matrizes e cálculos numéricos: O Octave é especialmente adequado para trabalhar com matrizes e realizar cálculos numéricos. Ele suporta operações matriciais, álgebra linear, manipulação de vetores e escalares, além de funções matemáticas avançadas.
Funções embutidas: O Octave possui uma ampla gama de funções embutidas para realizar cálculos matemáticos, estatísticos, trigonométricos, lógicos e outros tipos de operações numéricas.
Gráficos e visualização: O Octave oferece recursos para criar gráficos e visualizar dados. Ele suporta plotagem de gráficos 2D e 3D, diagramas de dispersão, histogramas e outras formas de visualização de dados.
Extensibilidade: O Octave permite estender sua funcionalidade por meio de pacotes e bibliotecas. Existem diversos pacotes disponíveis que fornecem recursos adicionais para áreas específicas, como processamento de sinais, controle, otimização, entre outros.
Código aberto: O Octave é um software de código aberto, o que significa que o seu código-fonte está disponível gratuitamente para acesso, modificação e distribuição. Isso permite que a comunidade contribua para o seu desenvolvimento e oferece flexibilidade aos usuários.
Em resumo, o Octave é uma ferramenta poderosa para realizar cálculos numéricos, análises científicas e implementação de algoritmos, sendo uma alternativa popular ao MATLAB.
Ele é amplamente utilizado por pesquisadores, engenheiros, cientistas e estudantes em diversas áreas acadêmicas e industriais.
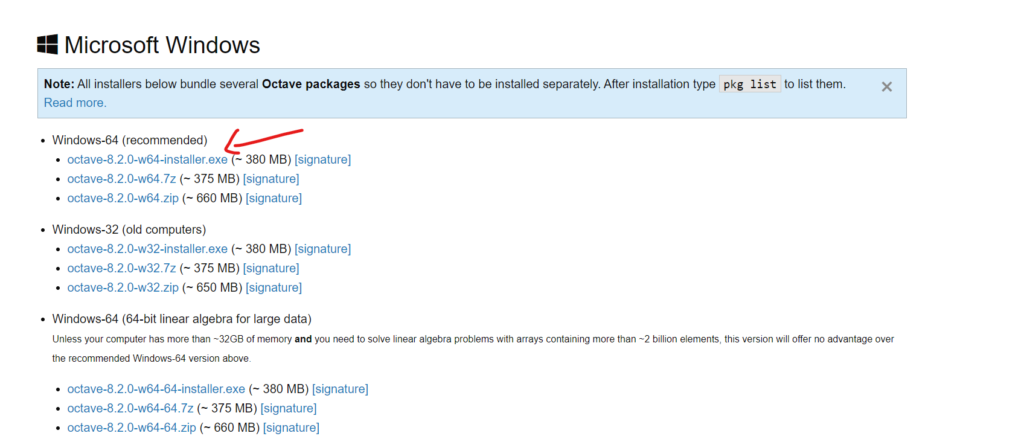
Baixando o Octave
O Octave pode ser baixado através do seguinte site: