NCURSES, conforme o wikipédia, fornece uma biblioteca que provê uma API para o desenvolvimento de interfaces em modo texto. Garante também uma otimização quanto as mudanças de telas, reduzindo a latência quando se utiliza acesso remoto via shells.
Instalando o NCURSES
Para instalar o ncurses é muito simples, basta digitar o comando abaixo:
Agora iremos criar o Nosso Makefile para carregar os scripts:
Arquivo Makefile
# Script de criacao do banco de dados
# Autor Marcelo Maurin Martins
# Daa: 31/01/2022
#
APP=mysql
all: database Tabelas
database:
$(APP) < database.sql
Tabelas:
$(APP) < pessoas.sql
Em seguida iremos criar o script de criação da base de dados, database.sql:
#Cria um banco de dados em Mysql
#Autor: Marcelo Maurin Martins
#31/01/2022
create database IF NOT EXISTS `testedb`;
E por fim nossa tabela pessoas.sql
#Cria a tabela de pessoas
#Autor: Marcelo Maurin Martins
#31/01/2022
use testedb;
create table if not exists pessoas
(
idPessoa INT(6) unsigned auto_increment primary key,
nome varchar(30) not null,
dtnasc date,
profissao varchar(20),
sexo char(1),
dtchg timestamp default current_timestamp on update current_timestamp,
dtcad timestamp default current_timestamp
);
Executando Scripts
Entre na pasta scripts, para que possamos criar nossas estruturas de banco.
Digite o comando:
make
executa a criação do banco
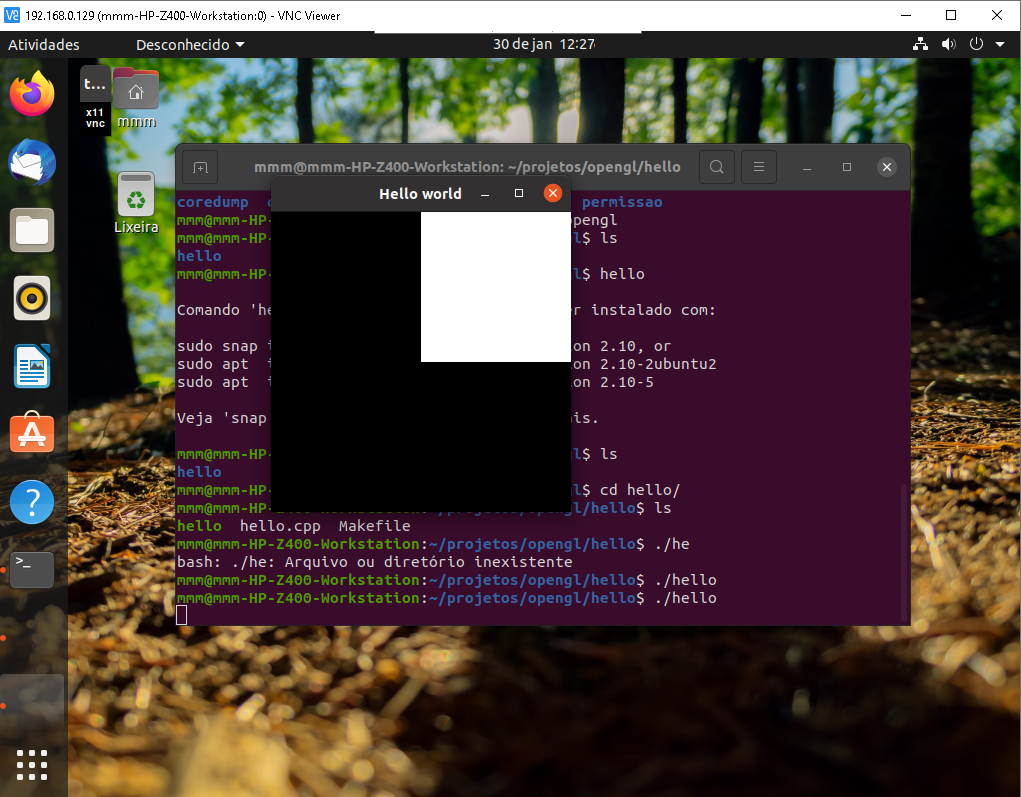
A figura abaixo mostra sua execução
Exemplo do script do banco de dados
Por fim mais um vídeozinho
Procedimento de instalação dos scripts
Permissões
Ao montar o segundo artigo lembrei que para melhorar este artigo, o ideal seria criar uma conta especifica para cada aplicação. Desta forma criei um scripts novo chamado GRANTS.SQL
Desta forma, existe essa ultima etapa. Que precisamos, que será criar um usuário para acesso a aplicação:
Criando o usuario:
CREATE USER 'seu_usuario'@'localhost' IDENTIFIED BY 'suasenha';
Dando permissão:
GRANT ALL PRIVILEGES ON * . * TO 'seu_usuario'@'localhost';
Finalizando
FLUSH PRIVILEGES;
Este procedimento será validado, quando digitarmos
mysql -h localhost -u gcc -p
Conectando em banco de dados
Pois se as permissões não estiverem corretas o usuario não conecta.
Sempre que avançarmos em uma etapa, um novo usuário será criado, neste script.
Então não estranhem se eventualmente os scripts sofrerem modificação no git.
Cenas do próximos capítulos
Agora que preparamos a cama, iremos começar a codificar nela. No próximo artigo iremos criar um crud em C para cadastrar pessoas.
Neste artigo irei apresentar um exemplo de código de opencv em C++.
Irei comentar traçando referencias entre o código do C e o código do python.
O Exemplo utililizado será fornecido pela própria biblioteca em python.
Aqui vemos o exemplo comentado do fonte
OpenCV em Python
Para traçar um paralelo usaremos os códigos do opencv, o programa chamado video_v4l2.py
Conforme apresentado abaixo:
#!/usr/bin/env python
'''
VideoCapture sample showcasing some features of the Video4Linux2 backend
Sample shows how VideoCapture class can be used to control parameters
of a webcam such as focus or framerate.
Also the sample provides an example how to access raw images delivered
by the hardware to get a grayscale image in a very efficient fashion.
Keys:
ESC - exit
g - toggle optimized grayscale conversion
'''
# Python 2/3 compatibility
from __future__ import print_function
import numpy as np
import cv2 as cv
def main():
def decode_fourcc(v):
v = int(v)
return "".join([chr((v >> 8 * i) & 0xFF) for i in range(4)])
font = cv.FONT_HERSHEY_SIMPLEX
color = (0, 255, 0)
cap = cv.VideoCapture(0)
cap.set(cv.CAP_PROP_AUTOFOCUS, 0) # Known bug: https://github.com/opencv/opencv/pull/5474
cv.namedWindow("Video")
convert_rgb = True
fps = int(cap.get(cv.CAP_PROP_FPS))
focus = int(min(cap.get(cv.CAP_PROP_FOCUS) * 100, 2**31-1)) # ceil focus to C_LONG as Python3 int can go to +inf
cv.createTrackbar("FPS", "Video", fps, 30, lambda v: cap.set(cv.CAP_PROP_FPS, v))
cv.createTrackbar("Focus", "Video", focus, 100, lambda v: cap.set(cv.CAP_PROP_FOCUS, v / 100))
while True:
_status, img = cap.read()
fourcc = decode_fourcc(cap.get(cv.CAP_PROP_FOURCC))
fps = cap.get(cv.CAP_PROP_FPS)
if not bool(cap.get(cv.CAP_PROP_CONVERT_RGB)):
if fourcc == "MJPG":
img = cv.imdecode(img, cv.IMREAD_GRAYSCALE)
elif fourcc == "YUYV":
img = cv.cvtColor(img, cv.COLOR_YUV2GRAY_YUYV)
else:
print("unsupported format")
break
cv.putText(img, "Mode: {}".format(fourcc), (15, 40), font, 1.0, color)
cv.putText(img, "FPS: {}".format(fps), (15, 80), font, 1.0, color)
cv.imshow("Video", img)
k = cv.waitKey(1)
if k == 27:
break
elif k == ord('g'):
convert_rgb = not convert_rgb
cap.set(cv.CAP_PROP_CONVERT_RGB, 1 if convert_rgb else 0)
print('Done')
if __name__ == '__main__':
print(__doc__)
main()
cv.destroyAllWindows()
A primeira informação importante é a carga das bibliotecas do opencv em python.
import cv2 as cvimport cv2 as cv
carga da lib em python
O proximo ponto importante é onde capturamos o vídeo.
cap = cv.VideoCapture(0)
Captura do vídeo
O Parametro 0, indica que o device de vídeo é o padrão do sistema.
O ponto importante no código é o uso do cap, no código abaixo:
_status, img = cap.read()
captura do frame
Ao chamar a função read, dois parametros são retornados, _status (retorno de sucesso) e img, a imagem capturada.
Por fim, uma janela é montada com a visualização da imagem capturada:
cv.imshow(“Video”, img)
janela é montada
Agora iremos analisar o mesmo código em C.
OpenCV em C
Agora mostraremos o código em C, o exemplo é o videocapture_basic.cpp:
#include <opencv2/core.hpp>
#include <opencv2/videoio.hpp>
#include <opencv2/highgui.hpp>
#include <iostream>
#include <stdio.h>
using namespace cv;
using namespace std;
int main(int, char**)
{
Mat frame;
//--- INITIALIZE VIDEOCAPTURE
VideoCapture cap;
// open the default camera using default API
// cap.open(0);
// OR advance usage: select any API backend
int deviceID = 0; // 0 = open default camera
int apiID = cv::CAP_ANY; // 0 = autodetect default API
// open selected camera using selected API
cap.open(deviceID, apiID);
// check if we succeeded
if (!cap.isOpened()) {
cerr << "ERROR! Unable to open camera\n";
return -1;
}
//--- GRAB AND WRITE LOOP
cout << "Start grabbing" << endl
<< "Press any key to terminate" << endl;
for (;;)
{
// wait for a new frame from camera and store it into 'frame'
cap.read(frame);
// check if we succeeded
if (frame.empty()) {
cerr << "ERROR! blank frame grabbed\n";
break;
}
// show live and wait for a key with timeout long enough to show images
imshow("Live", frame);
if (waitKey(5) >= 0)
break;
}
// the camera will be deinitialized automatically in VideoCapture destructor
return 0;
}
O primeiro ponto assim como no código em python, e a chamada da biblioteca em c.
Sem esses includes não teriamos acessos aos tipos do C, como o que segue:
VideoCapture cap;
O tipo VideoCapture é o tipo associado a captura de vídeo da câmera.
Onde usaremos, conforme fragmento abaixo:
int deviceID = 0; // 0 = open default camera
int apiID = cv::CAP_ANY; // 0 = autodetect default API
// open selected camera using selected API
cap.open(deviceID, apiID);
Aqui, definimos o deviceID como 0, ou seja, o valor padrão, veja a semelhança do uso do python.
E apiID, passando o escopo (variavel) CAP_ANY, que tem por valor 0.
Chamamos o método open da classe VideoCapture, indicando o deviceID, e o apiID.
Agora iremos ler a imagem da camera, que podemos fazer, através da seguinte função:
cap.read(frame);
Neste fragmento de código, passamos o parametro frame, que é do tipo Mat.
O frame receberá a imagem capturada.
E por fim, no código abaixo a janela que irá mostrar a imagem na interface gráfica.
imshow("Live", frame);
Conclusão
Apesar das diferenças de linguagem, podemos ver o pontos em comum, e a sutileza da semelhança.
É lógico que os códigos foram escolhidos a dedo. Justamente por conta da semelhança e simplicidade.
O opencv é uma biblioteca rica, cheia de opções e dificuldades, este tutorial, bem como o autor, esta apenas adentrando neste mundo para mim misterioso.
A prototipagem é a capacidade de transformar idéias em algo real, criando uma ou mais exemplares a fim de teste de conceito.
A prototipagem não visa criar um produto final, mas validar o conceito deste. Realizando testes de viabilidade, resistência e usabilidade.
O protótipo pode ser modificado e amadurecido, durante o seu tempo de teste. Podendo passar por muitas revisões. Sendo de fato, um tempo destinado para este amadurecimento como produto.
A prototipagem de hardware pode ser:
Prototipagem eletrônica – Consistindo em partes impressas ou não, montadas de forma artesanal ou em cnc routers especificos para PCB. Com o intuíto de teste de circuitos eletrônicos.
Prototipagem mecânica – Consiste em partes impressas ou não , montadas de forma artesanal ou em impressoras 3d.
Um exemplo de prototipagem é a construção da caixa do RFID, que na revisão 1, identificou um erro no posicionamento do chanfro.
Conforme vídeo abaixo:
Erro de prototipagem da caixa plastica.
No caso deste projeto houve duas ações.
Correção da caixa, através uma broca foi feito o ajuste grosseiro na mesma.
Correção no projeto, através de ferramenta cad, a correção no projeto da caixa, para reimpressão e ajuste.