Listando processos

Uma forma simples no linux, para saber quais os processos estão rodando no seu computador, é o uso do comando PS.
O PS lista os processos do sistema rodando na sua máquina.
Entende-se por processos, programas que rodam no computador, de forma aparente ou não.
No exemplo abaixo, podemos ver o uso do comando, na forma mais simples:
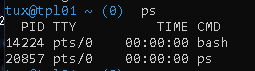
Ao rodar o ps sozinho, vemos apenas os processos do nosso usuário, ou seja, os processos que nosso usuário esta executando.
Documentação online
O comando ps, pode ser visto em detalhes, através do link abaixo:
https://man7.org/linux/man-pages/man1/ps.1.html
Vendo todos os processos
Uma forma simples de ver todos os processos que estão sendo executados na máquina, é através do comando:
ps -A
Conforme apresentado abaixo, o ps -A, lista todos os processos em execução.

Podemos usar um recurso comum, a associação com o grep, que é um filtro de resultado.
ps -A|grep -e post
Neste caso, podemos observar que o resultado é filtrado por ocorrencias que tem a palavra post.

Esta técnica é muito útil, para pesquisar processos que desejamos.
Informações acessórias do ps
No exemplo acima, podemos ver a primeira linha onde apresenta o nro 2141, este número é o pid do processo.
PID é o identificador do processo, é um numero que identifica unicamente o processo em execução. O PID é utilizado entre outras coisas, para matar o processo, exemplo:
kill 2141
No exemplo acima, o kill irá matar o processo 2141, encerrando o mesmo.
Em algumas situações é necessário ter permissão para fazer essa operação. De fato, se o processo não for do próprio usuário o kill só pode ser dado pelo usuario que o criou ou pelo administrador do sistema.
O tempo, que aparece a seguir 00:00:12, é o tempo que este processo esta ativo, ou o tempo de execução. Alguns processos, podem ficar por muito tempo em execução, outros tem uma vida muito curta. O tempo de execução de um processo, depende da forma que ele foi desenvolvido, e de sua finalidade.
Mais opções do PS
Outra opção muito útil, é o comando:
ps -ef
Neste exemplo, o ps, fornece uma lista mais detalhada de informações a cerca do processo.

Como podemos ver, alem do pid, temos o usuário do processo, o PID pai, a hora da execução, o tempo no ar, alem de informações mais detalhadas, a cerca da execução em si.
Documentação do Grep
https://linux.die.net/man/1/grep
Neste link podemos ver as informações da documentação de todos os paramentros associados ao grep.
Agradecimentos
Bom pessoal, espero que este post tenha ajudado voces na fantástica jornada ao mundo linux, quero agradecer ao Lucas Lima, que contribuíu com algumas dicas que tornaram viavel a realização deste artigo.
Feed Back
Se o artigo, foi útil, nos envie um feed back, para o email marcelomaurinmartins@gmail.com.
Grande abraço.