O Controler é uma ferramenta de teste e controle externo.
O Controler trabalha por TCP, desta forma voce e o robô precisam estar em rede Internet ou Lan.
Permitindo o controle e telemetria sobre o robô.
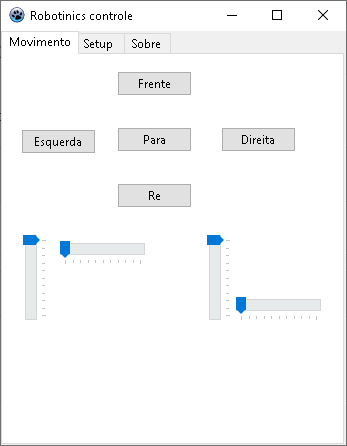
Ele possui 3 abas de funções que serão apresentadas a seguir.
Configuração
Ao entrar na rede local , o robô deverá ser identificado pelo seu ip, sendo aberto uma porta 7091, conforme apresentado a seguir.

Ao clicar em conectar, os comandos ao robô passam a ser aceitos por esta interface.

Download
Para baixar os fontes do Controler
https://github.com/marcelomaurin/robotinics/tree/master/Software/tools/windows/Controler
Instalação
O procedimento de instalação do Controler é bem simples, ao baixar os fontes localizados na pasta bin, deve-se instalar.
Inicialmente ele pergunta o idioma de instalação.

Em seguida, solicitará confirmação do local de instalação.
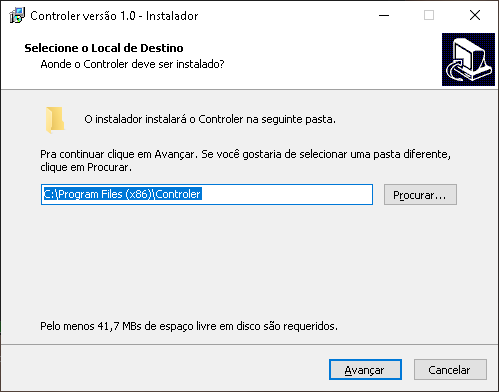
Click em Avançar para continuar.
Na próxima etapa, será questionado se deseja instalar um atalho na área de trabalho.

Selecione se deseja, e click em avançar.
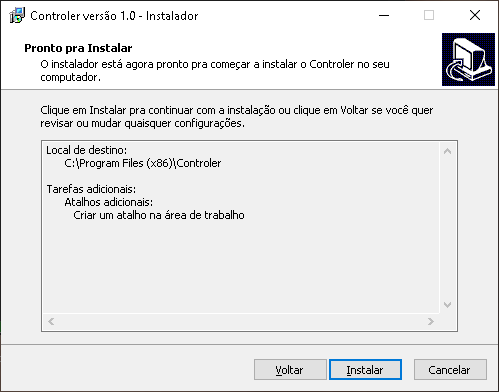
Por fim, ele mostrará o que foi indicado, e confirmará se deseja seguir com a instalação, para continuar, click em avançar.
Ao clicar em Instalar, o software, inicia o processo de instalação dos arquivos, e ao terminar apresentará a seguinte tela.
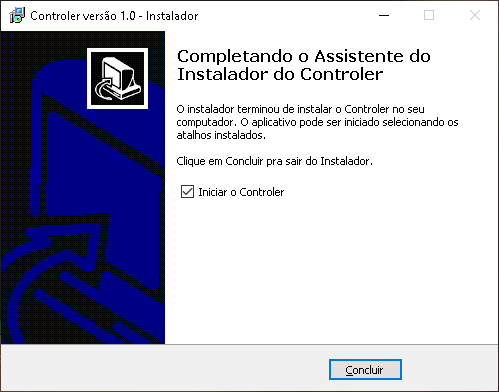
Neste passo, selecione Iniciar ou entre no menu do windows e selecione o Controler.