Aqui incluiremos uma série de informações sobre o projeto da base rodas.
O Base rodas é a parte do robô que possui a alimentação, e os componentes de locomoção, como rodas, motor, ponte Hm sensores de corrente e tensão, alem de reles.
A diferença da versão 1 para 2, esta no conceito de tudo que é importante, esta na base.
Uma das maiores dificuldades do projeto inicial, é que a base possuia muitos fios conectando indo e voltando para o corpo e os demais membros.
Agora, passaremos 4 cabos, 12V,GND, 5V, USB. Tudo mais, é controlado na própria base.
A própria base é um robô, pois é independente do resto do corpo.
Podendo existir por si só.
Lista de Componentes da Base Rodas:
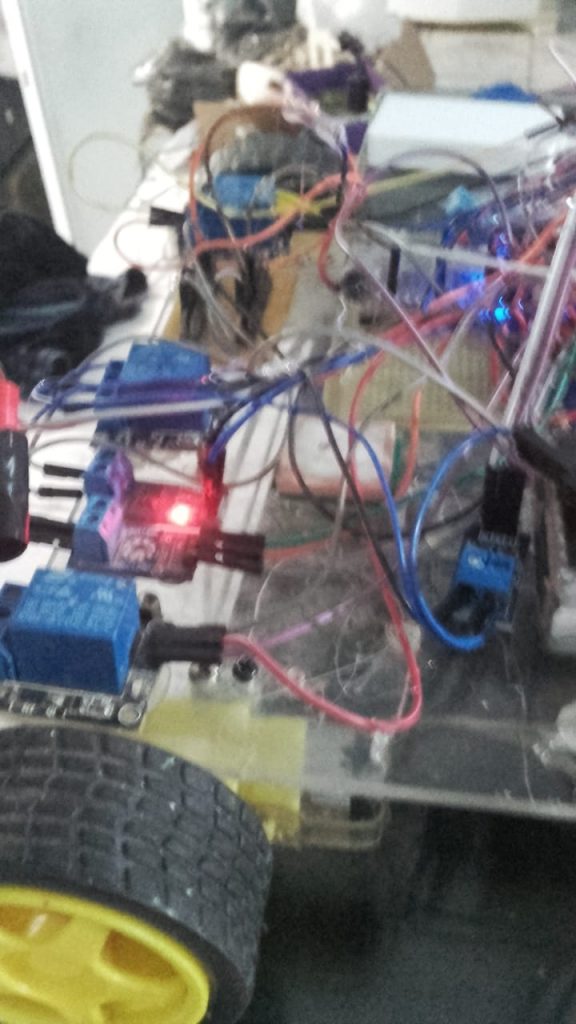
- 3 relês
- 2 Sensores de voltagem
- 1 sensor de corrente
- Controlador 12V para 5V
- Arduino nano e seu shield
- Ponte H
- sensor de temperatura e humidade DHT11
- Bluetooth
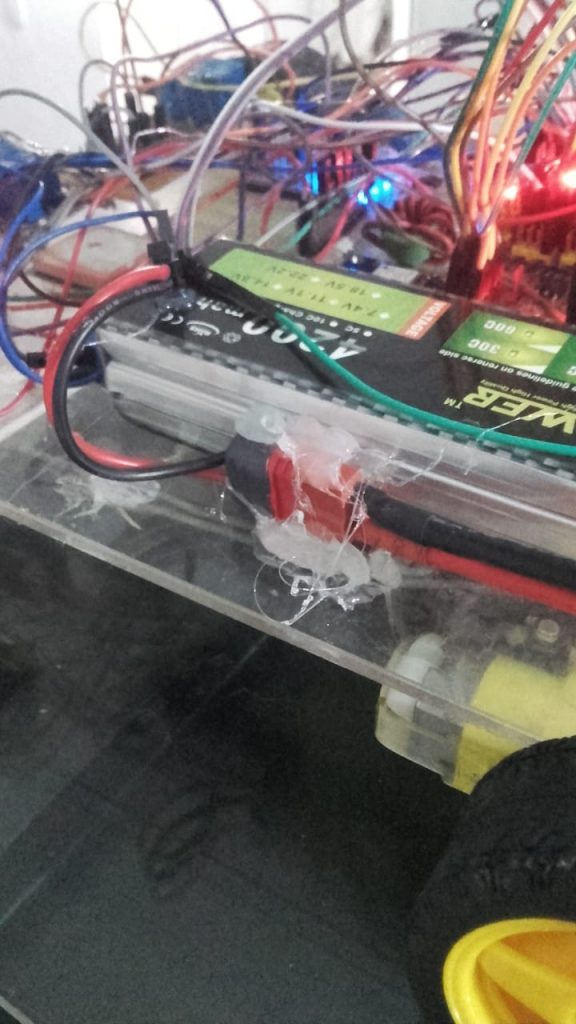
- Bateria 4200mah 11.1Volts
- 4 rodas com redutor
- base acrílico para sustentação
- prolongadores metálicos de 15cm
- Tampa acrílica para fixação superior
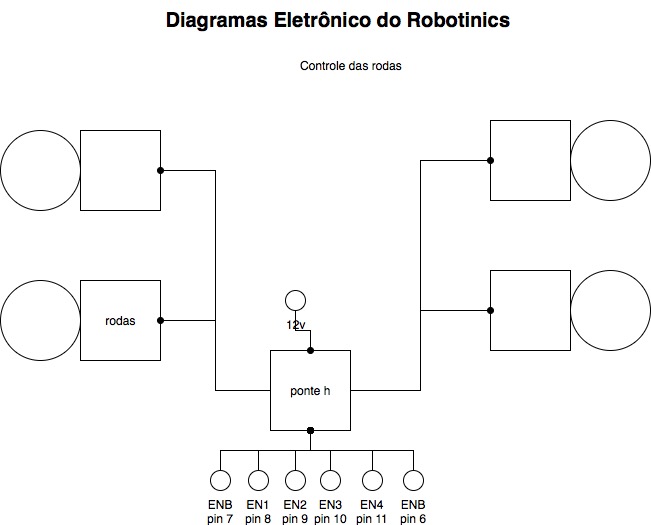
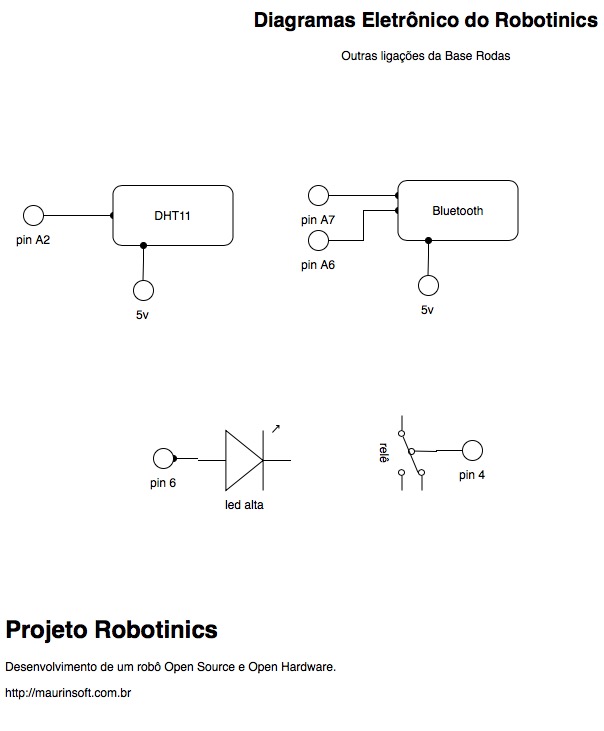
Esquemáticos elétrico
Aqui, serão incluídos os esquemáticos das ligações elétricas do robotinics.
Peço desculpas, se alguns símbolos não estão conforme padrão, pois a ferramenta que usei para diagramar não possuía todos os símbolos. Então peguei os mais próximos.
Aqui, podemos ver a conexão entre os motores e a ponte-H, mostrando como o arduino nano se comunica.

Aqui apresentamos uma visão dos demais dispositivos conectados
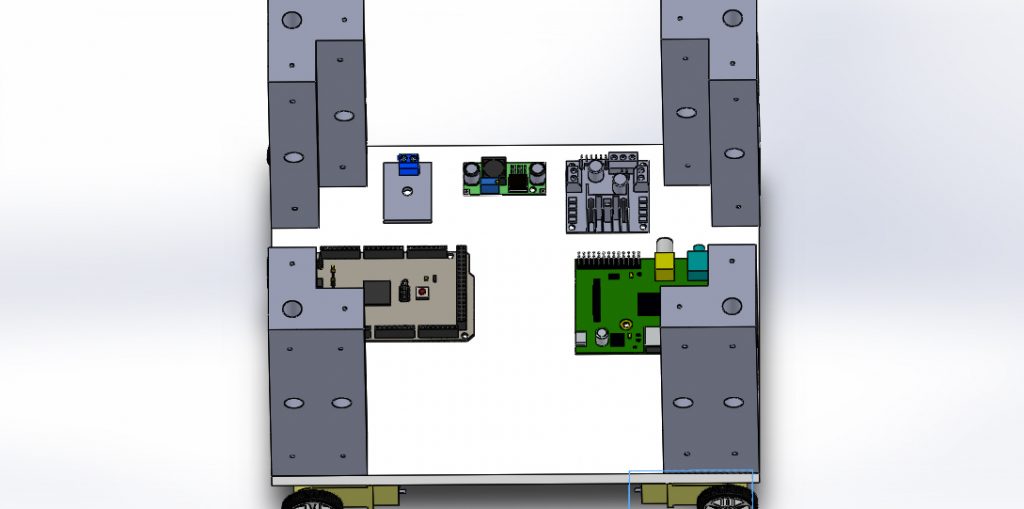
Estrutura de suporte
A estrutura e demais peças estão apoiadas em uma base de acrílico com as seguintes medidas.
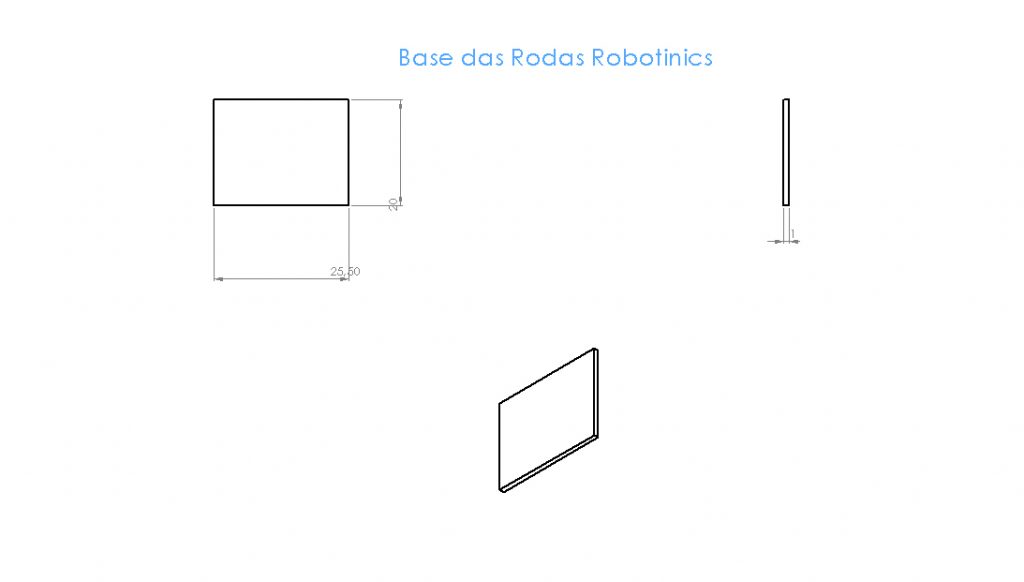
As informações e diagramas de vista técnica podem ser vistos no Solidworks.
Firmware
A versão do firmware do robotinics da base robô, esta disponível no Sourceforge.
Click aqui, e baixe a versão mais recente do MBase.
Os comandos do firmware da base, podem ser vistos em artigo que escrevi.