Octave – Sistema de transferência Malha fechada
No vídeo anterior, apresentamos uma pequena apresentação de um sistema de malha aberta.
Agora iremos apresentar um exemplo de malha fechada.
Conforme o wiki:
“Também chamado de controle retroativo (realimentação ou feedback) necessita de informações da saída do controlador através de elementos sensores ou transdutores, compara o sinal da saída com o set-point(referência) e corrige a saída caso a mesma esteja desviando-se dos parâmetros programados.”
O vídeo de treinamento deste material pode ser visto aqui.
Primeiramente, temos que carregar a função control, através do comando:
pkg load controlEm seguida criamos o num01 e den01, da planta.
Em seguida criamos o num02 e den02 da função de controle.
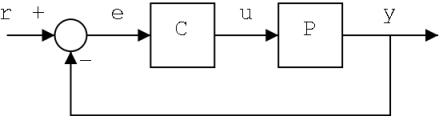
Por fim atribuimos a função de feedback, através da união de ambas as funções:
sys01= feedback(tf01,tf02);Lembrando que a função feedback , aceita mais um parâmetro, que é o sinal de realimentação.
“Se sign for omitido ou definido como +1, indica que o sinal de realimentação é positivo (realimentação negativa). Se sign for definido como -1, indica realimentação positiva.”
%Apresentação do sistema de malha fechada
pkg load control
%Sistema de transferencia da planta.
num01 = [1];
den01 = [1,2,10];
%tf01 - Sistema da Planta
%tf01=tf([1],[1,2,10])
tf01=tf(num01,den01);
num02=[2];
den02=[1];
% Função de controle
tf02=tf(num02,den02);
% Construir o sistema de malha fechada
sys01= feedback(tf01,tf02);
disp(sys01);
step(sys01);
xlabel('tempo');
ylabel('saida v');
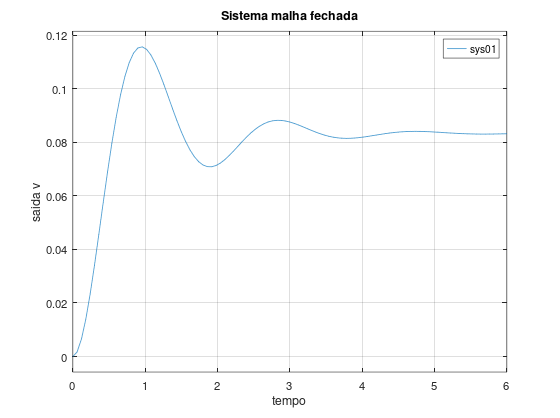
title('Sistema malha fechada');
Resultado da função de malha fechada