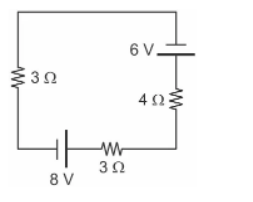
1 – O desenho abaixo representa um circuito elétrico composto por resistores ôhmicos, um gerador ideal e um receptor ideal. Qual a potência elétrica dissipada no resistor de 4 Ω?
Segunda lei de Kirchhoff.
8 + 3.i + (-6) + 4.i + 3.i = 0
8 -6 + 3i +4i +3i = 0
10i = -2
i = -0.2A
(Sentido Invertido )
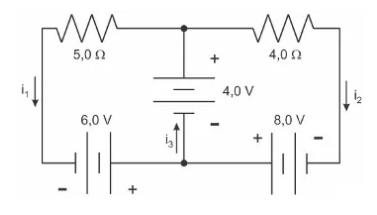
2- Determine os valores das correntes elétricas i1, i2 e i3.
Vivemos em uma era em que a quantidade de dados gerados diariamente é imensa. Empresas, organizações e até mesmo indivíduos têm acesso a uma quantidade sem precedentes de informações. No entanto, a grande questão é: como podemos aproveitar ao máximo esses dados para obter insights valiosos?
É aí que entra o Kaggle, uma plataforma online que se tornou referência quando se trata de análise de dados. O Kaggle é um verdadeiro tesouro para cientistas de dados, entusiastas e profissionais que buscam dados confiáveis e diversificados.
O que é o Kaggle?
O Kaggle é uma comunidade online que reúne cientistas de dados e entusiastas de todo o mundo. Seu principal objetivo é fornecer um espaço onde as pessoas possam compartilhar, colaborar e competir em projetos de análise de dados.
Uma das características mais interessantes do Kaggle é a sua vasta coleção de conjuntos de dados. Esses conjuntos são disponibilizados por empresas, organizações governamentais e até mesmo por outros membros da comunidade. Isso significa que você pode encontrar dados sobre praticamente qualquer assunto que possa imaginar.
Como usar o Kaggle?
Para começar a usar o Kaggle, basta visitar o site https://www.kaggle.com/ e criar uma conta gratuita. Depois de fazer isso, você terá acesso a uma variedade de recursos e ferramentas.
Uma das principais vantagens de usar o Kaggle é a capacidade de participar de competições de análise de dados. Essas competições são uma ótima maneira de testar suas habilidades e aprender com outros membros da comunidade. Além disso, elas muitas vezes oferecem prêmios em dinheiro ou oportunidades de emprego para os melhores colocados.
Outro recurso interessante do Kaggle é o Kernels. Os Kernels são notebooks interativos que permitem que você crie, execute e compartilhe código Python. Isso é especialmente útil para aqueles que estão começando na área de análise de dados e desejam aprender com exemplos práticos.
Por que usar o Kaggle?
O Kaggle é uma ferramenta poderosa para qualquer pessoa interessada em análise de dados. Aqui estão algumas razões para considerar o uso dessa plataforma:
Ampla variedade de conjuntos de dados: o Kaggle oferece uma enorme quantidade de dados sobre os mais diversos temas, permitindo que você encontre exatamente o que precisa para o seu projeto.
Comunidade ativa: o Kaggle é frequentado por uma comunidade de cientistas de dados e entusiastas que estão sempre dispostos a compartilhar conhecimento e ajudar uns aos outros.
Recursos educacionais: além das competições e Kernels, o Kaggle também oferece cursos e tutoriais gratuitos para quem deseja aprender mais sobre análise de dados.
Em resumo, o Kaggle é uma plataforma essencial para quem trabalha com análise de dados. Seja você um cientista de dados experiente ou apenas um entusiasta, o Kaggle oferece uma infinidade de recursos e oportunidades para aprimorar suas habilidades e encontrar os dados necessários para seus projetos.
Sendo os 3 pacotes iniciais, apenas apoio, e o libfreenect-dev realmente a lib necessária.
Hello World da Biblioteca
Neste primeiro projeto, pouca coisa faremos, apenas iremos compilar identificando o device.
#include <stdio.h>
#include <stdlib.h>
#include <libfreenect.h>
freenect_context *f_ctx;
freenect_device *f_dev;
int user_device_number = 0; // Normalmente 0 se você tiver apenas um Kinect
void depth_cb(freenect_device *dev, void *v_depth, uint32_t timestamp) {
// Callback para dados de profundidade - não usado neste exemplo
}
void rgb_cb(freenect_device *dev, void *rgb, uint32_t timestamp) {
// Salva uma imagem RGB capturada pelo Kinect
FILE *image = fopen("output_image.ppm", "wb");
if (image == NULL) {
printf("Erro ao abrir o arquivo para escrita\n");
return;
}
fprintf(image, "P6\n# Kinect RGB test\n640 480\n255\n");
fwrite(rgb, 640*480*3, 1, image);
fclose(image);
printf("Imagem salva como output_image.ppm\n");
// Depois de salvar a imagem, podemos sair do loop principal
freenect_stop_video(dev);
freenect_close_device(dev);
freenect_shutdown(f_ctx);
exit(0);
}
int main() {
if (freenect_init(&f_ctx, NULL) < 0) {
printf("freenect_init() falhou\n");
return 1;
}
if (freenect_open_device(f_ctx, &f_dev, user_device_number) < 0) {
printf("Não foi possível abrir o dispositivo\n");
freenect_shutdown(f_ctx);
return 1;
}
freenect_set_depth_callback(f_dev, depth_cb);
freenect_set_video_callback(f_dev, rgb_cb);
freenect_set_video_mode(f_dev, freenect_find_video_mode(FREENECT_RESOLUTION_MEDIUM, FREENECT_VIDEO_RGB));
freenect_start_video(f_dev);
while (freenect_process_events(f_ctx) >= 0) {
// Processa eventos do Kinect até que a captura de imagem seja concluída
}
return 0;
}
Neste exemplo o programa pega o kinect e tira uma foto, salvando na maquina local.
Vamos entender o código.
A freenect_init inicia a api.
A próxima função freenect_open_device, abre o device conforme o número que estiver descrito. Isso permite abrir mais de um kinect na mesma maquina.
As funções freenect_set_depth_callback e freenect_set_video_callback criam funções de callback, para controle, se voce não sabe o que é leia este artigo:
Perceba aqui que o pulo do gato neste makefile, é a inclusão da pasta /usr/lib/x86_64-linux-gnu que é onde a lib se encontra. Bem como a /usr/include/libfreenect que é onde o header se encontra.
Compilando o projeto
Para compilar esse projeto, é necessário apenas rodar o script na pasta src do ubuntu:
make all
Compilando o projeto
Rodando o programa
Agora iremos rodar o programa, isso é a parte mais simples.
Ao rodar, ele captura uma foto, e salva, conforme apresentado.
Reconhecimento de voz usando o srvOuve, permite ouvir o que se diz.
O srvOuve, é um projeto de minha autoria, que permite criar aplicação de Voz para Texto. Neste projeto, iremos utilizar várias abordagens diferentes, para criar uma aplicação para atender essa finalidade.
Neste primeiro projeto finalizado, criamos um serviço de voz para texto que precisa ser online.
O projeto srvOuve, permite utilizar diversos serviços diferentes, ouvindo tanto online como offline, unificando assim a forma de obter esses serviços em um único canal.
Permitindo criar integrações mais ageis.
No exemplo do vídeo usamos o MNote como ferramenta de integração. Onde ele recebe o texto “escutado” pelo srvOuve e repassa ao CHATGPT, permitindo assim que esse responda, e depois convertendo em texto de voz, através do srvFalar, outro projeto de minha autoria.
Este é um roteiro de instalação e preparação do seu UBUNTU para rodar o kinect.
O Kinect é parte integrante do XBOX 365, que apesar de já bem antigo (2024) ainda é uma tecnologia disruptiva, trazendo muitos benefícios para quem trabalha com IA e processamento de imagem.
O intuito deste tutorial é demonstrar o que é necessário para rodar o kinect no PC com linux.
Hardware
Logicamente, o kinect 365 é necessário.
Porem não somente ele, o hardware foi construído para o XBOX e possui um conector proprietário, que precisa alem de um adaptador, também de fonte externa para o PC.
Voce pode facilmente encontrar este adaptador se procurar “adaptador kinect xbox PC” em qualquer site de compras.
Software
Existe um pacote para linux que permite rodar o kinect, é o libfreenect.
Se olharmos na lista de repositórios do ubuntu por freenect, encontraremos os seguintes pacotes:
freenect – library for accessing Kinect device — metapackage
libfreenect-bin – library for accessing Kinect device — utilities and samples
libfreenect-demos -library for accessing Kinect device — dummy package
libfreenect-dev – library for accessing Kinect device — development files
libfreenect-doc – library for accessing Kinect device — documentation
libfreenect0.5 – library for accessing Kinect device
Para instalar esses pacotes siga o roteiro, instalando primeiro os pacotes requeridos.
Existe um conjunto de demos que foram criados para permitir usar o kinect. Vamos entender cada um.
freenect-camtest: Uma ferramenta de teste para verificar o funcionamento básico das câmeras RGB e de profundidade do Kinect.
freenect-chunkview: Utilitário para visualizar dados de “chunk” (pedaço), útil para debugar ou entender como os dados são transferidos do Kinect.
freenect-cpp_pcview: Um visualizador de nuvem de pontos escrito em C++, demonstrando como processar e visualizar dados de profundidade em 3D.
freenect-cppview: Similar ao freenect-cpp_pcview, oferece uma visualização básica da saída RGB e de profundidade usando C++.
freenect-glview: Provavelmente um dos exemplos mais usados, oferece uma visualização ao vivo simples das câmeras RGB e de profundidade usando OpenGL.
freenect-glpclview: Uma ferramenta avançada para visualizar a saída do Kinect como uma nuvem de pontos 3D, utilizando a biblioteca PCL (Point Cloud Library) e OpenGL para renderização.
freenect-hiview: Uma ferramenta de visualização que pode ser usada para exibir dados de alta resolução do Kinect.
Teste com freenect-glview
Demonstra o uso do kinect.
No nosso próximo artigo, irei demonstrar o uso do kinect, e fazer um exemplo de código em C.