25/05/2019
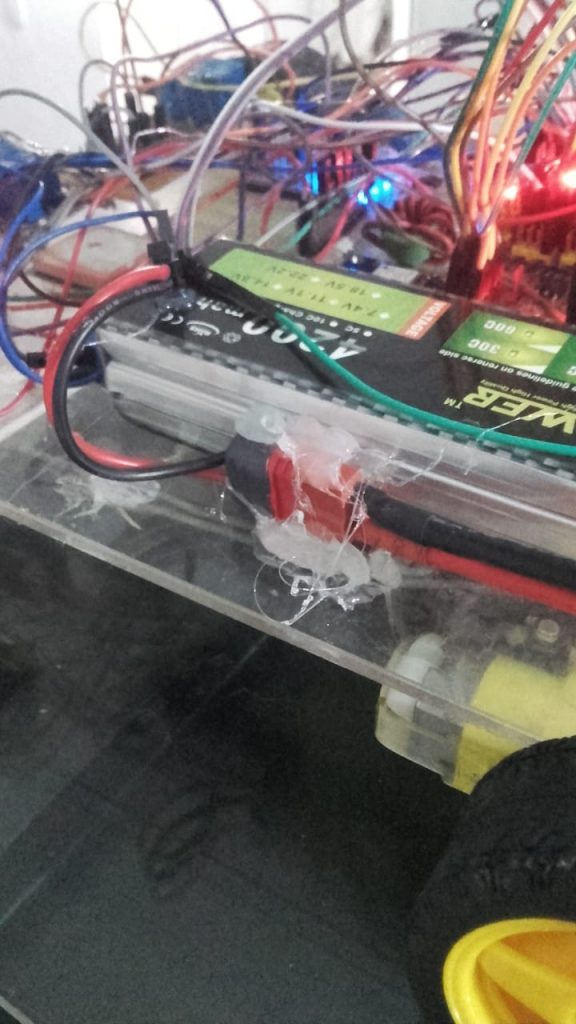
Temos problemas
Infelizmente a bateria de 4200mah esta ruim, passou o dia inteiro carregando e ainda esta com 4.5Volts.
Novidades
Controle de Bateria
Hoje implementei o controle de carga automática do módulo base.
A bateria é o módulo que inicia, desta forma se o robô estiver desconectado da fonte ele consegue dar partida.
O problema é quando a bateria esta baixa. Mas é assim que irá ficar!
Carga Automática
O Controle de Carga automática testa a tensão da bateria, abaixo de 9Volts, ele desliga automaticamente.
De 10V até 9.0V ele dá avisos sobre a bateria, também inclui um pino 6, que pode ser conectado um led, e irá piscar quando a bateria estiver baixa.
Quando a bateria acima de 10V o led ficará aceso.
Quando a bateria estiver abaixo de 9V, ficará apagado.
Proteção de carregamento
Inclui também um controle, para que toda vez que chavear para bateria, o carregador de bateria irá desligar. Desta forma, evito quebrar o carregador.
Carga automática de Bateria
Implementei, também o controle de carga automática caso a bateria esteja na alimentação externa, e a bateria estiver baixa. Desta forma, dou alguma inteligência ao circuito.