Neste artigo irei explanar como criar um projeto de Servidor Json Java Spring.
O objetivo deste artigo, é documentar os passos necessários que eu utilizei para fazer.
Sou novo neste negócio, por isso, tudo o que desenvolvo, acabo documentando para tentar mapear, e posteriormente não perder.
Talvez não sirva para você.Porem como os passos sempre são semelhantes, a maior chance, é que minhas dificuldades enfrentadas tambem sejam as suas.]
Boa Sorte!
Configurando o Intellij
Configurando o pom.xml
Entre no seu projeto, e configure o arquivo pom.xml. Irei apresentar um modelo, que peço que se baseia, porem dependendo das características do seu projeto, este pode mudas.
<?xml version="1.0" encoding="UTF-8"?>
<project xmlns="http://maven.apache.org/POM/4.0.0"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:schemaLocation="http://maven.apache.org/POM/4.0.0 http://maven.apache.org/xsd/maven-4.0.0.xsd">
<modelVersion>4.0.0</modelVersion>
<parent>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-starter-parent</artifactId>
<version>3.1.0</version>
<relativePath/> <!-- lookup parent from repository -->
</parent>
<groupId>com.comlink</groupId>
<artifactId>SacDigital</artifactId>
<version>1.0-SNAPSHOT</version>
<properties>
<maven.compiler.source>19</maven.compiler.source>
<maven.compiler.target>19</maven.compiler.target>
<spring-boot.version>2.5.3</spring-boot.version>
<project.build.sourceEncoding>UTF-8</project.build.sourceEncoding>
</properties>
<dependencies>
<dependency>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-starter-web</artifactId>
</dependency>
<dependency>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-starter-test</artifactId>
<scope>test</scope>
</dependency>
</dependencies>
<build>
<plugins>
<plugin>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-maven-plugin</artifactId>
</plugin>
</plugins>
</build>
</project>
Não copie o fonte, verifiqueas dependency, plugin, parent, properties.
Criando servico em porta especifica
Em resources, crie o arquivo application.properties,
server.port=8081
Criando Perfil de application
Vá em resources , crie um novo file:
- application-development.properties
- application-production.properties
Em application.properties, inclua a seguinte diretiva
spring.profiles.active=development
Tanto no development como production,inclua os seguintes códigos:
spring.application.name=Servidor de SACDigital Producao
server.port=8088
Na classe onde usa spring, verifique se possui os seguintes imports.
import org.springframework.context.annotation.Configuration;
import org.springframework.context.annotation.Profile;
Por fim, o código pode ser visto no seguinte GITHUB:
https://github.com/marcelomaurin/MOCKSD
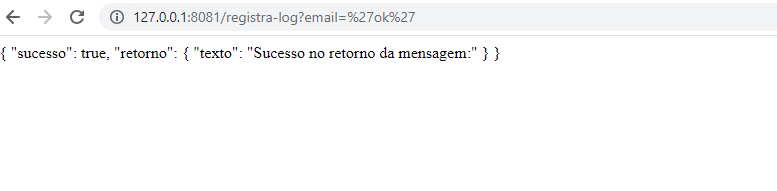
Exemplo de teste de conexão: