


Controle de Temperatura – Relógio
Comecei hoje a escrever o código do leitor de temperatura do relógio.
Implementei as rotinas de gravação dos parâmetros de tela. (unit de posicionamento de tela) .
Corrigi tambem, um bug associado ao posicionamento e gravação de parâmetros da porta serial.
O arduino nano relacionado, ao controle de temperatura, foi gravado e esta marcado no PIN A2.
Novos PCs
No intuito de melhorar o desenvolvimento de meus projetos, também adquiri dois novos computadores.
1 HP Z400 com 12Gb de RAM e placa de video NVIDIA 1800 com 1Gb de vídeo.
e HP Z600 com 8Gb de RAM, com dois processadores Xeon E5620, com placa de vídeo de 2Gb , NVidia Quadro 4000.

Nova aquisição
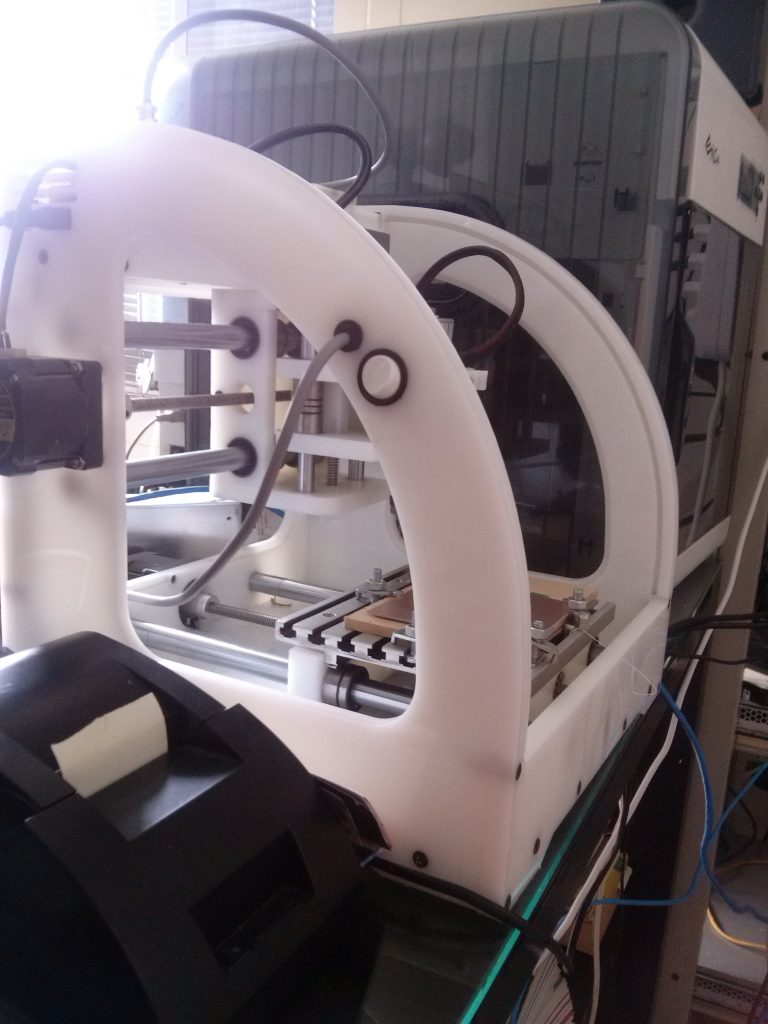
Tenho o prazer de anunciar que adquiri a pouco tempo, um CNC ROUTER para impressão de placas PCB.
Com esta valorosa aquisição, conseguirei alavancar ainda mais meu desenvolvimento em projetos complexos.
Relógio esta evoluindo
Inicialmente o relógio surgiu como um aplicativo para Win/MAC/Linux.
Logo em seguida, foi criado um device para permitir leitura da temperatura e humidade.
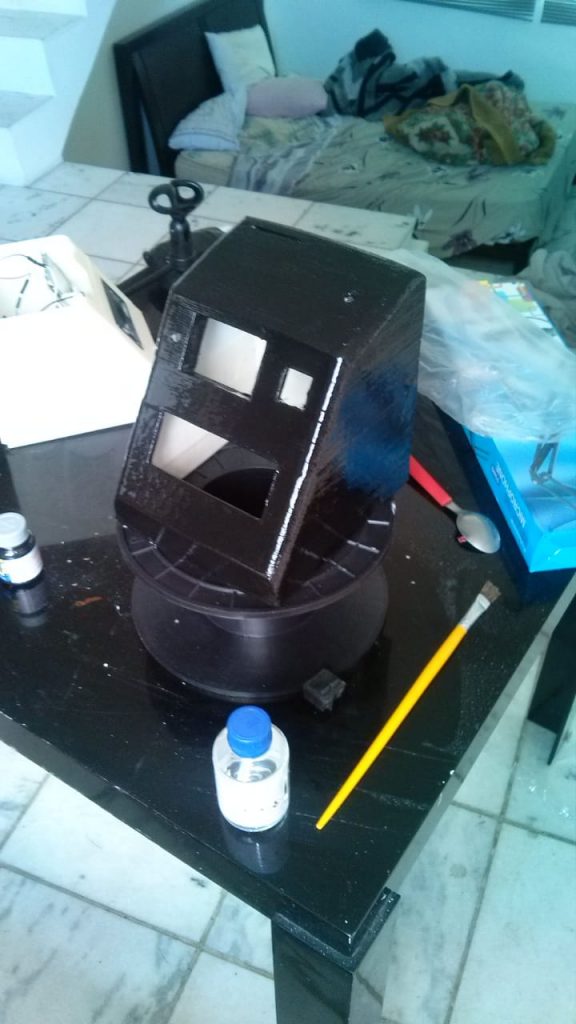
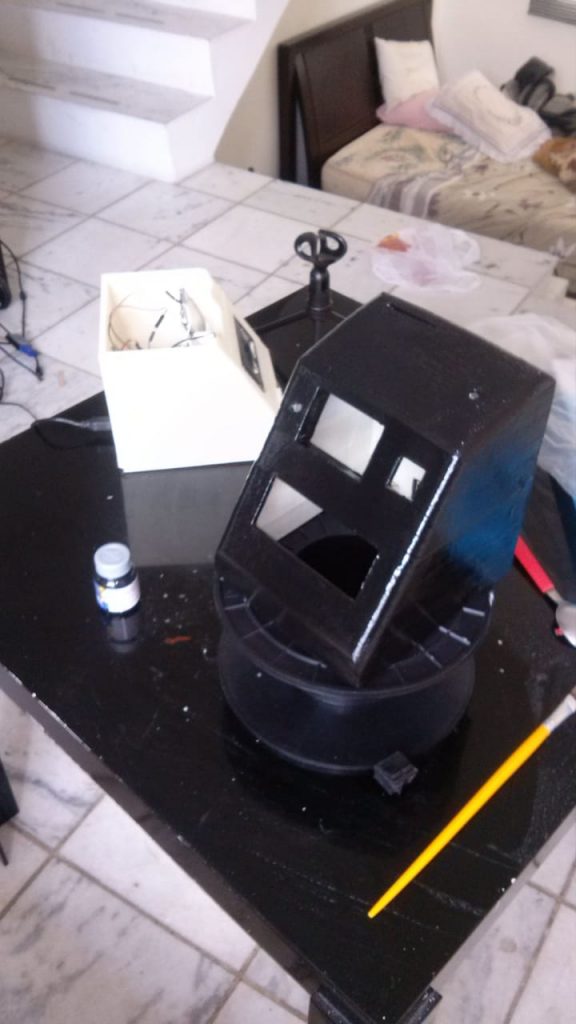
Agora, criamos um IOT que lê alem de temperatura, MP3, permitindo acumular a função de despertador e marcação de ponto.
Neste primeiro protótipo podemos ver que a “casca” foi desenvolvida com palitos de sorvete, justamente para prova de conceito.
Logo em seguida Melhoramos um pouco o hardware, e principalmente o software.
Ganhando mais funcionalidades e principalmente um Arduino Mega, que permite maior memória e capacidade de processamento.
Já com dois displays, implementei várias melhorias no relógio.
Hardware para controle de Horário
Foi desenvolvido o projeto do hardware, que permite integrar com o programa do relógio.
10/06/2019
Modulo de escuta.
Desenvolvi um modulo que faz a escuta dos dados que chegam da serial.
Este módulo auxiliará a desenvolver e debugar o SSC durante seu desenvolvimento.
Incluído no git.
Treinamento Android Studio
Ser programador não é tarefa fácil.
A tecnologia corre e se você não estudar constantemente, estará defasado rapidamente.

Já completei 20% do meu primeiro treinamento em Android. Espero chegar hoje a uns 80% do curso.
Vamos a luta.
Bateria – 9/6/2019
Comprei uma bateria pelo ML, eu a utilizarei para permitir que o robô tenha autonomia de movimentação.
A que comprei inicialmente, ficou velha e não segura carga.
Estou aguardando a chegada da bateria para publicar novos posts.
9/06/2019
Montei um vídeo de demonstração da aplicação hoje,
Ontem dia 08, finalizei o instalador do MAC.
Fiz a instalação do aplicativo em meu MAC e deu tudo certo, agora vou esperar o retorno do pessoal.
O próximo passo é implementar o controle de ponto, que acredito ser a peça chave deste projeto.